REPLACE project dataset 1 for simultaneous localization, mapping, and moving object tracking
Authors: Manuel Simas, Bruno J. Guerreiro, Pedro Batista
Contact: bguerreiro@isr.tecnico.ulisboa.pt
About this dataset
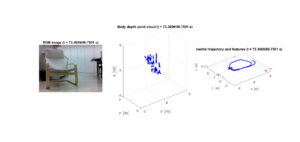
We release this dataset obtained within the scope of Project REPLACE, used in a paper being considered for publication in the Journal of Intelligent and Robotic Systems. The dataset is designed for validation of algorithms for simultaneous localization, mapping, and moving object tracking (SLAMMOT).
The dataset includes MOCAP ground-truth and RGB-D camera data, in the form of a single ROSBAG file with ~8 GB size, available at:
1. Google drive
2. ISR server
The code to parse and plot the data is available as a Github repository. The code provided there reads the raw dataset, parses the data to identify the features and vehicle motion, and plots the resulting variables. To test the dataset, just clone the repository into your PC, and run the command StartHere in MATLAB.
Notes:
- The version used to test this code was MATLAB 2019b.
- If the ROSBAG file is not yet in the code folder, the script will try to download it from the above links, which given the size of the file might take a while.
- There might be memory issues when loading the dataset, even if the code tries to avoid them.
Disclaimer
This code is provided “as is”, without warranty of any kind, expressed or implied.
Acknowledgments
This work was partially funded by the FCT projects REPLACE (PTDC/EEI-AUT/32107/2017), CAPTURE (PTDC/EEI-AUT/1732/2020) and DECENTER (PTDC/EEI-AUT/29605/2017), which include Lisboa 2020 and PIDDAC funds, and also by projects LARSYS (UIDB/50009/2020) and CTS (UIDB/00066/2020).
License
![]()
This dataset is released under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License (CC BY-NC-SA 4.0), which is free for non-commercial use (including research).